CMPT401_TWU
Lab Report 8
14-11-2023
Jonah Watts
Table Of Contents:
Assignment Project #1
Task Description:
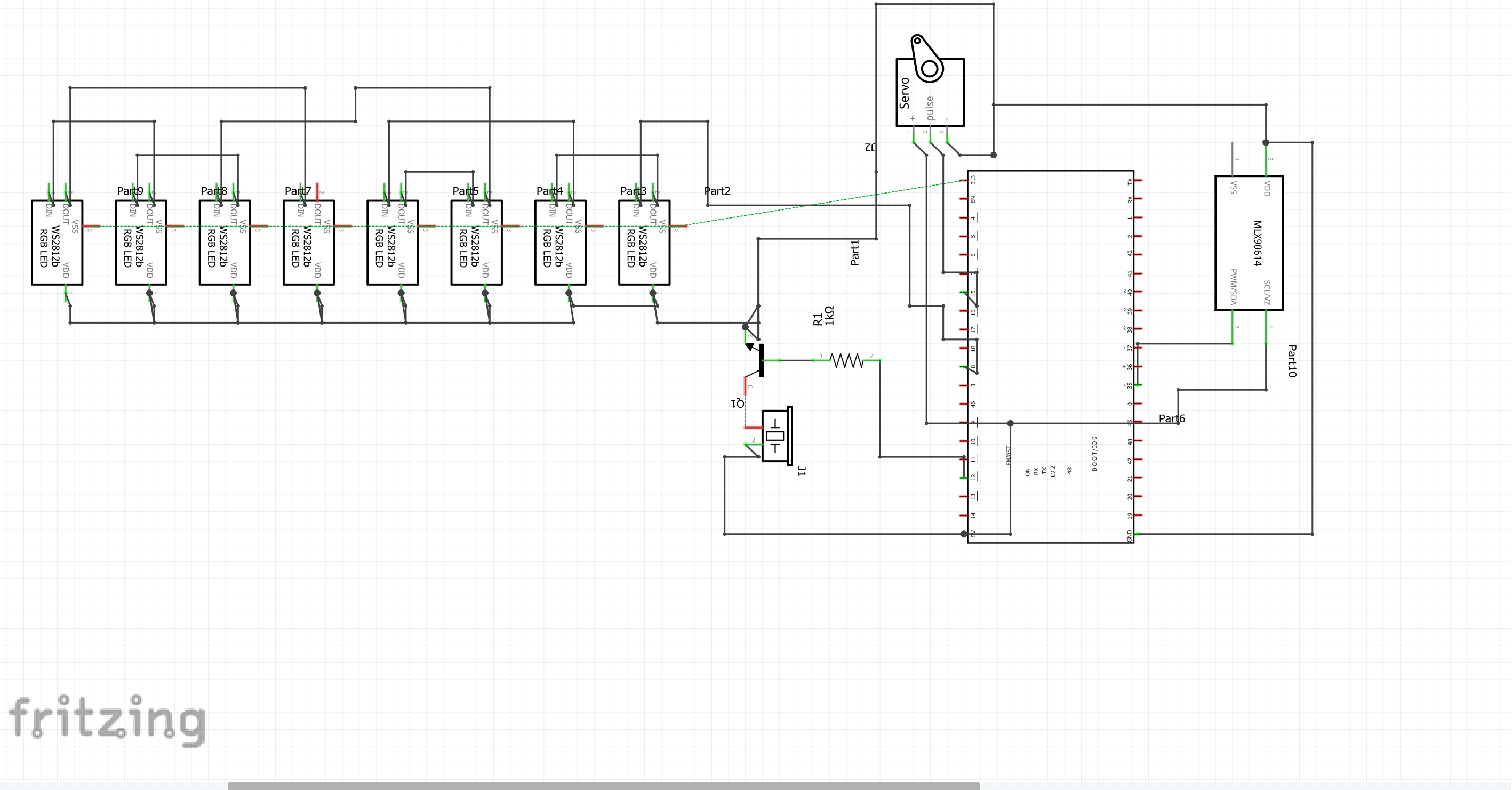
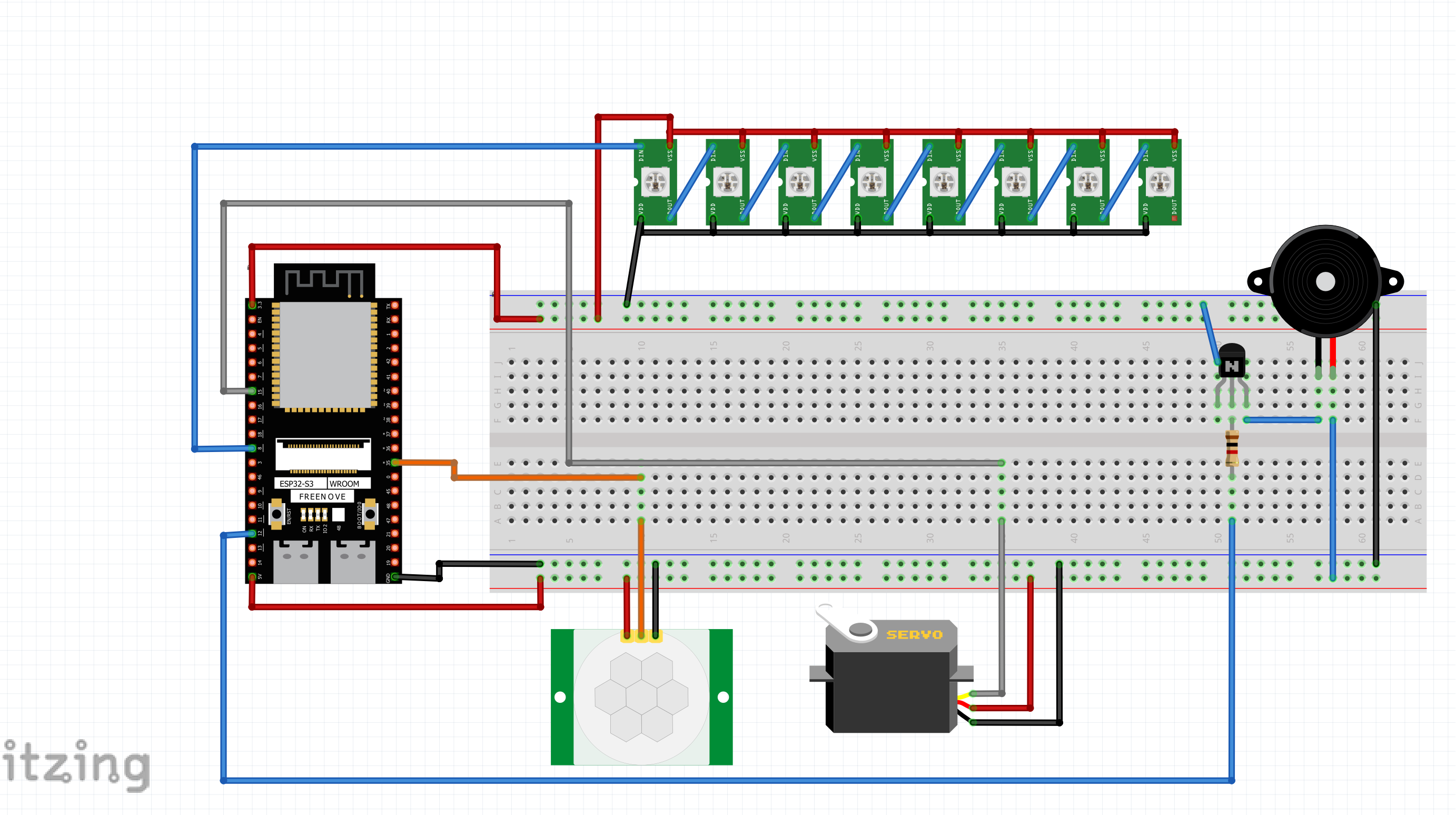
The goal of this assignment is to make an anti-burglar device, by using the infrared motion detector to see when there is movement. When movement is detected, the buzzer will play a tone, and the LED bar will light up. When there is no movement, the system will return to an inactive status.
Hardware Components:
- 1x ESP32
- 1x ESP32 Breakout Board
- 1x Breadboard
- 1x Buzzer
- 1x 1k Ohm Resistor
- 1x PNP Transistor
- 1x HC-SR501 Infrared Motion Detector
- 1x Neo Pixel
- 1x Servo Motor
Circut Diagrams
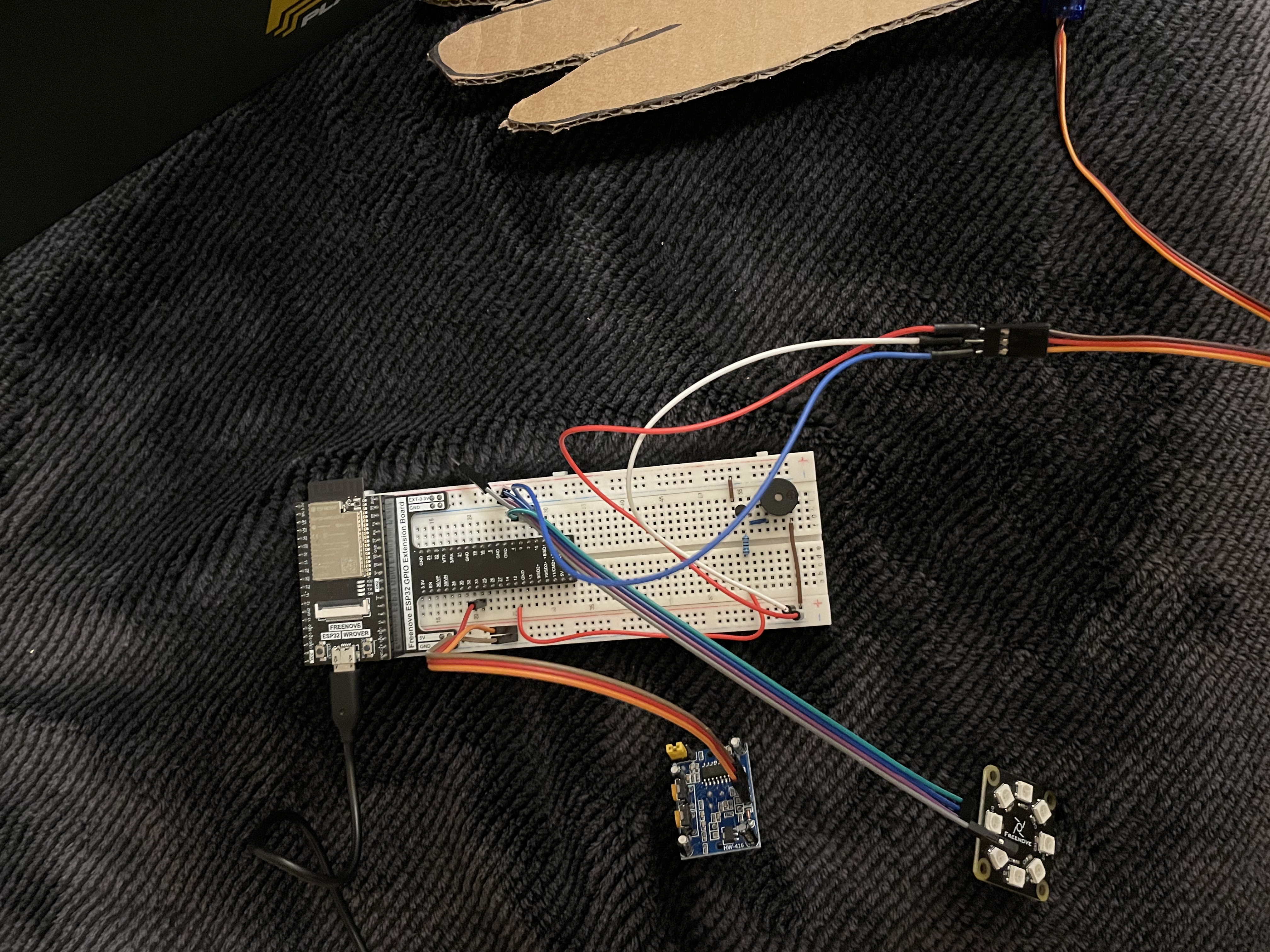
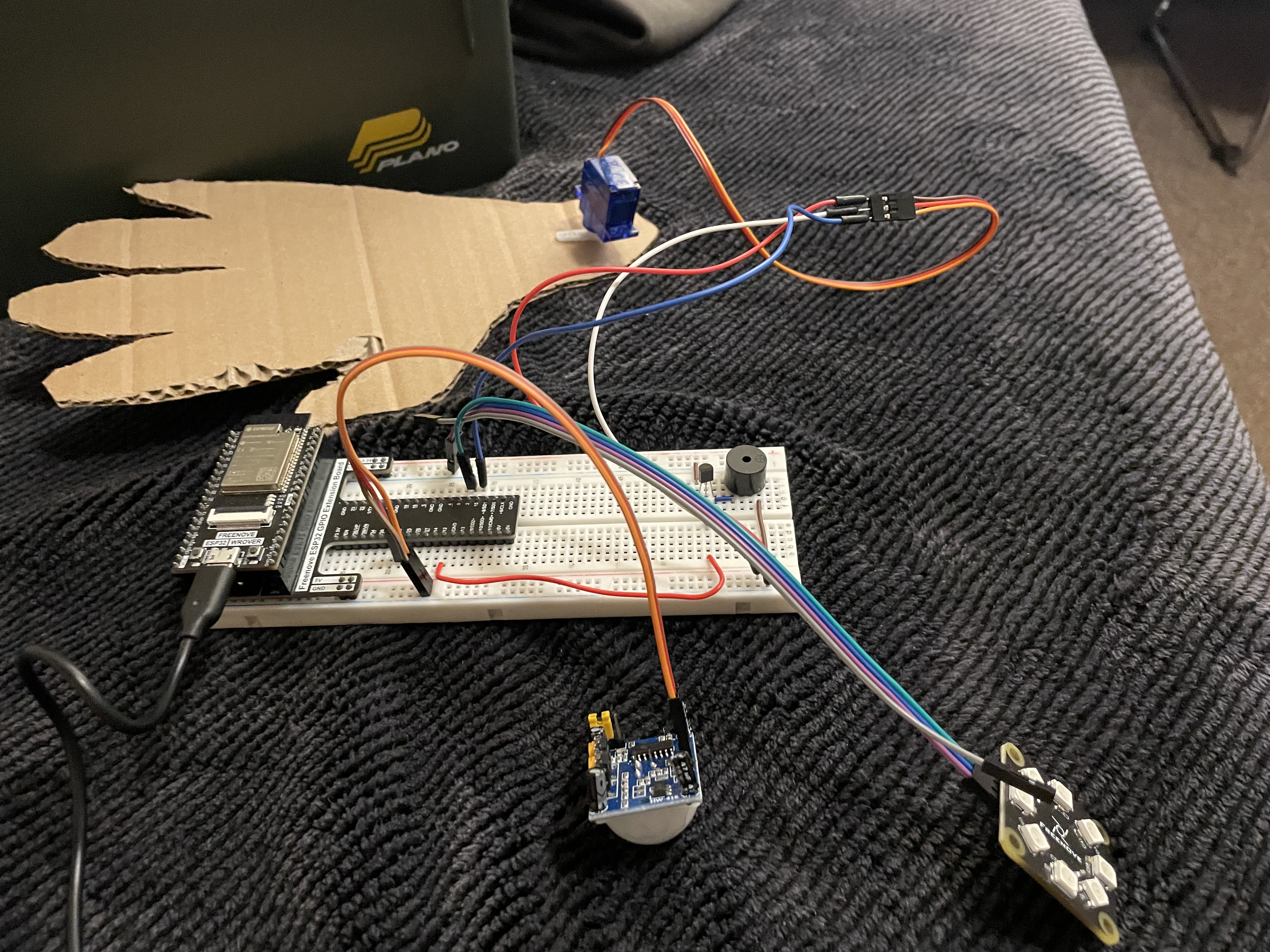
Photo(s) of the breadboard:
Source Code
The Source code can be downloaded here here
from machine import Pin, PWM
from myservo import myServo
import neopixel
import time
import math
pin = Pin(2, Pin.OUT)
np = neopixel.NeoPixel(pin, 8)
servo=myServo(15)
sensorPin=Pin(33,Pin.IN) #PIR sensor
PI=3.14
passiveBuzzer=PWM(Pin(12),2000)
brightness=200
colors=[[brightness,0,0], #red
[0,brightness,0], #green
[0,0,brightness], #blue
[brightness,brightness,brightness], #white
[0,0,0]] #close
try:
while True:
if sensorPin.value():
passiveBuzzer.duty(50)
servo.myServoWriteAngle(int(160))
for i in range(0,4):
for j in range(0,8):
sinVal=math.sin(j*i*10*PI/180)
toneVal=2000+int(sinVal*500)
passiveBuzzer.freq(toneVal)
np[j]=colors[i]
np.write()
time.sleep_ms(50)
servo.myServoWriteAngle(int(140))
time.sleep_ms(200)
else:
passiveBuzzer.duty(0)
for j in range(0,8):
np[j]=colors[4]
np.write()
time.sleep_ms(50)
except:
pass
Video of program in action
Assignment Project #2:
Task Description:
The task of this assignment is to use the gyroscope to detect which way that someone is falling. Each direction emmits a tone, and displays a message on the LCD screen. When there is no movement, the system will return to an inactive status.
Hardware Components
- 1x ESP32
- 1x ESP32 Breakout Board
- 2x Breadboard
- 1x Buzzer
- 2x 1k Ohm Resistor
- 1x NPN Transistor
- 1x MPU6050 Gyroscope
- 1x I2C LCD Display
Circut Diagrams
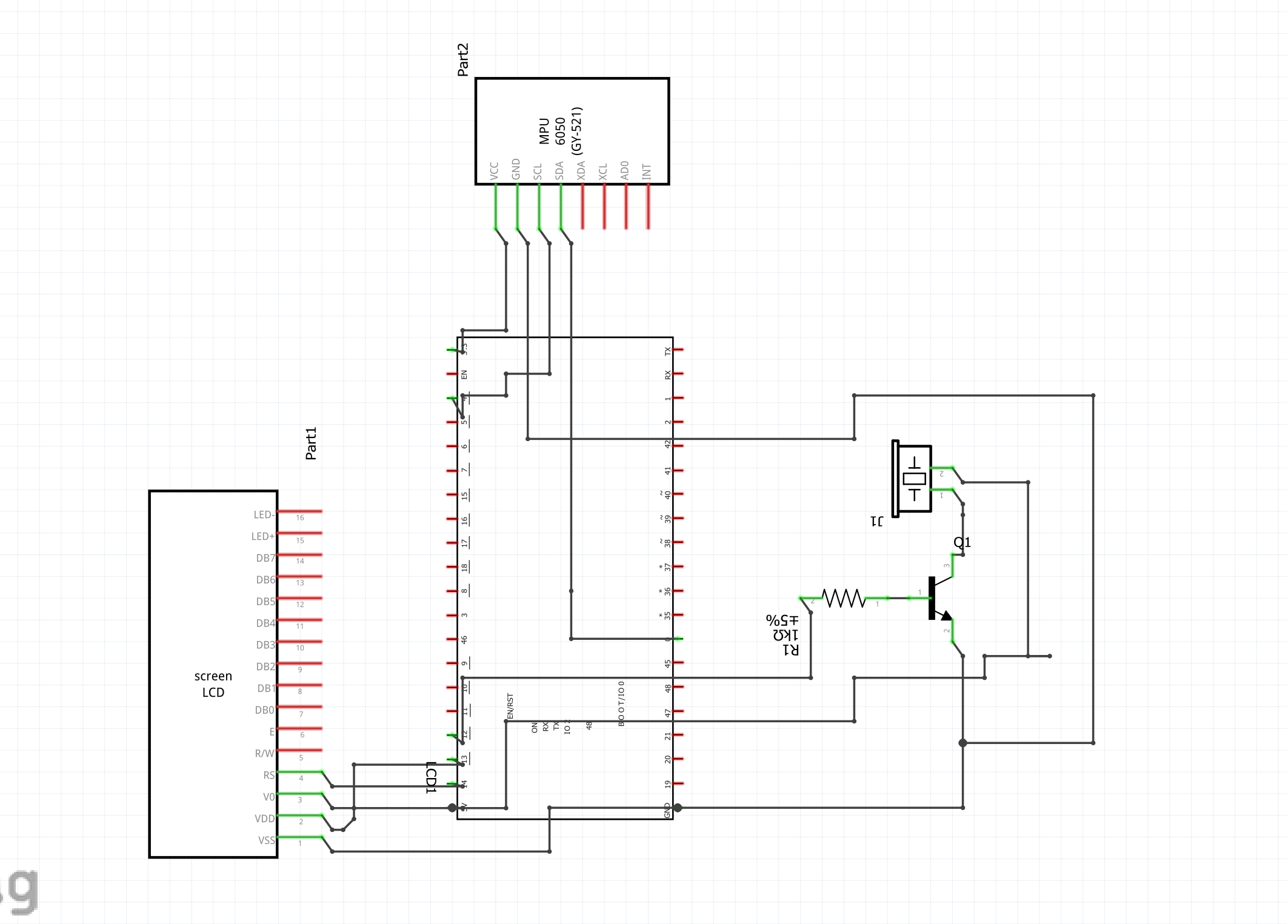
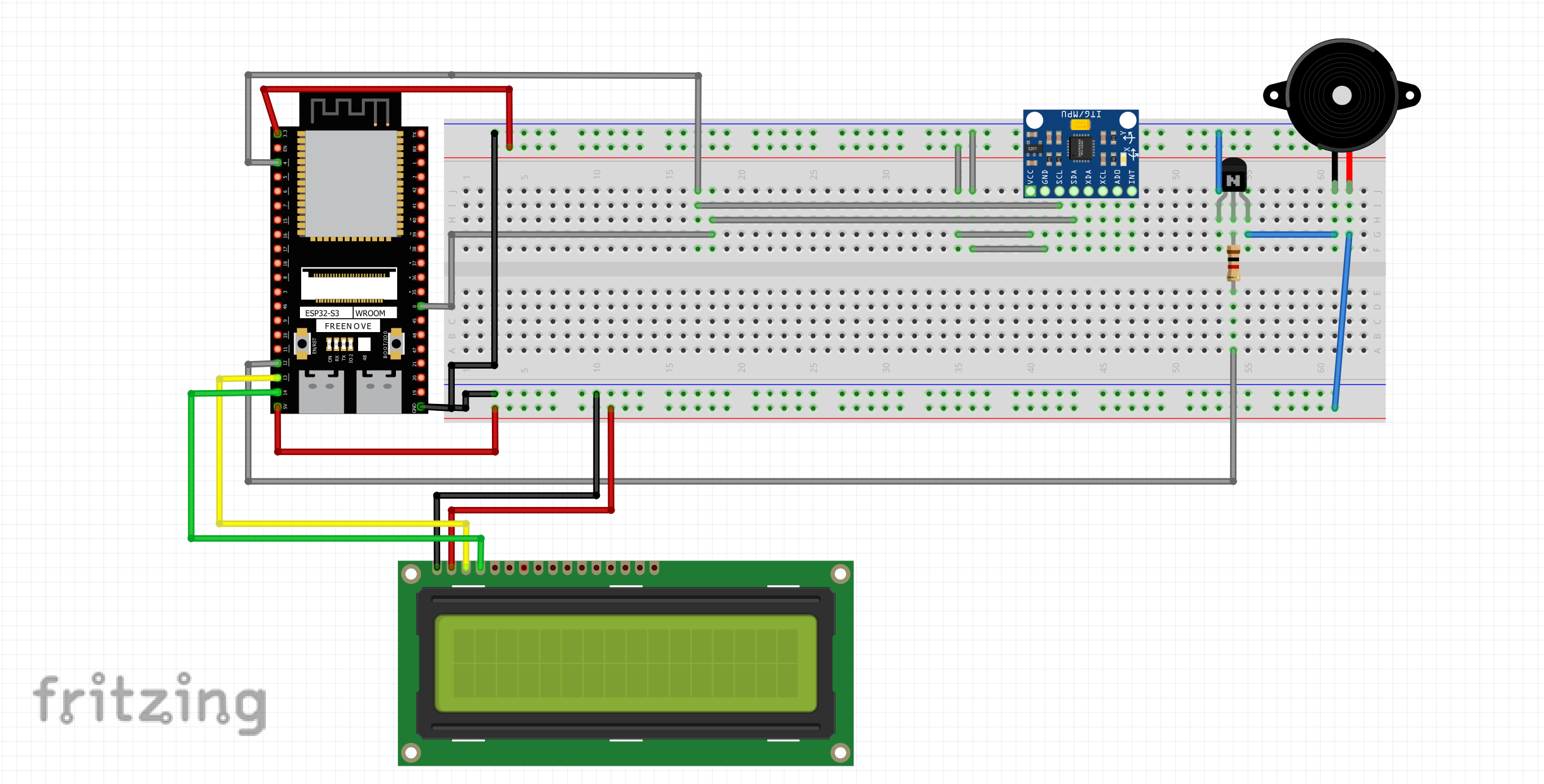
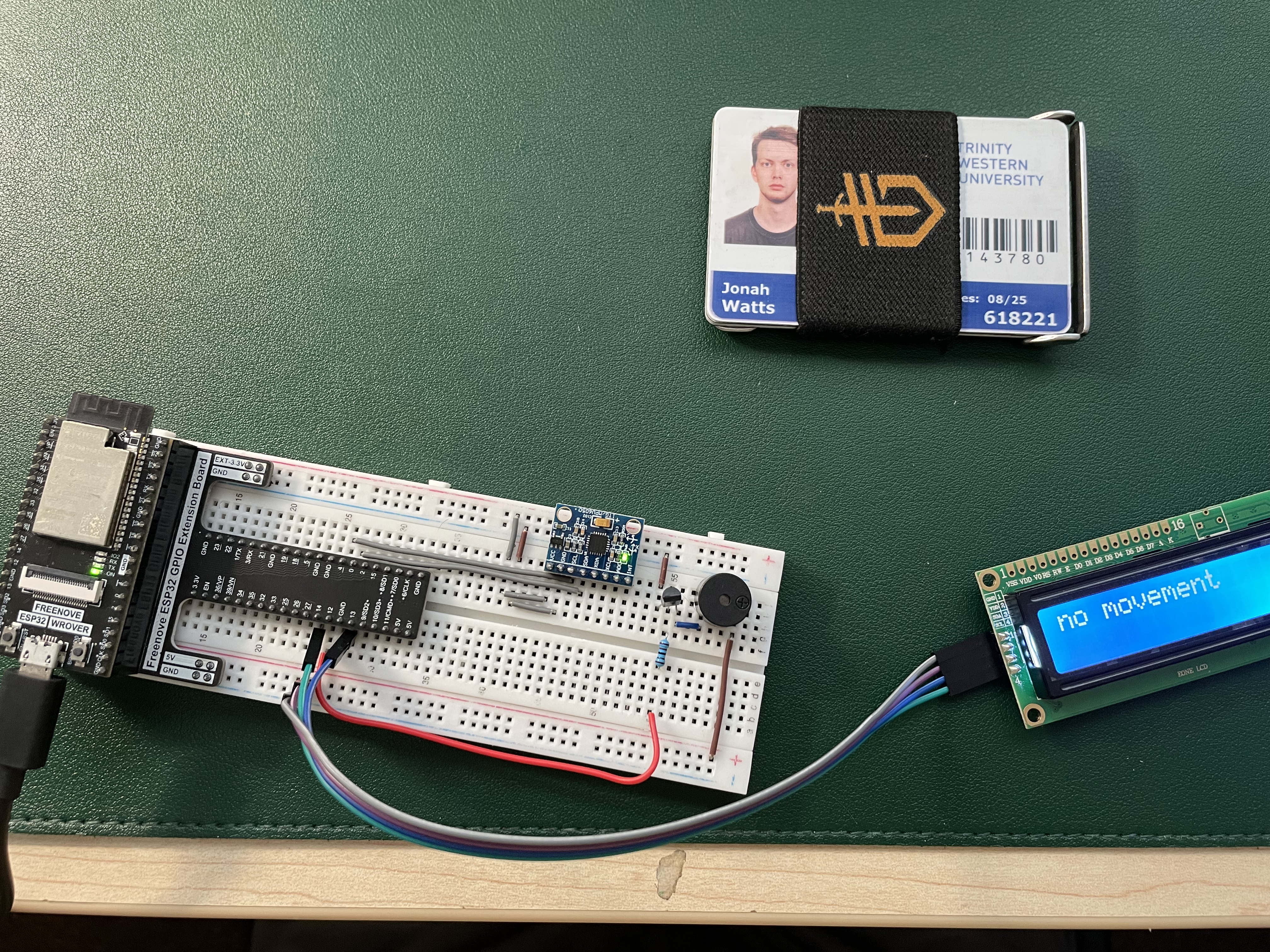
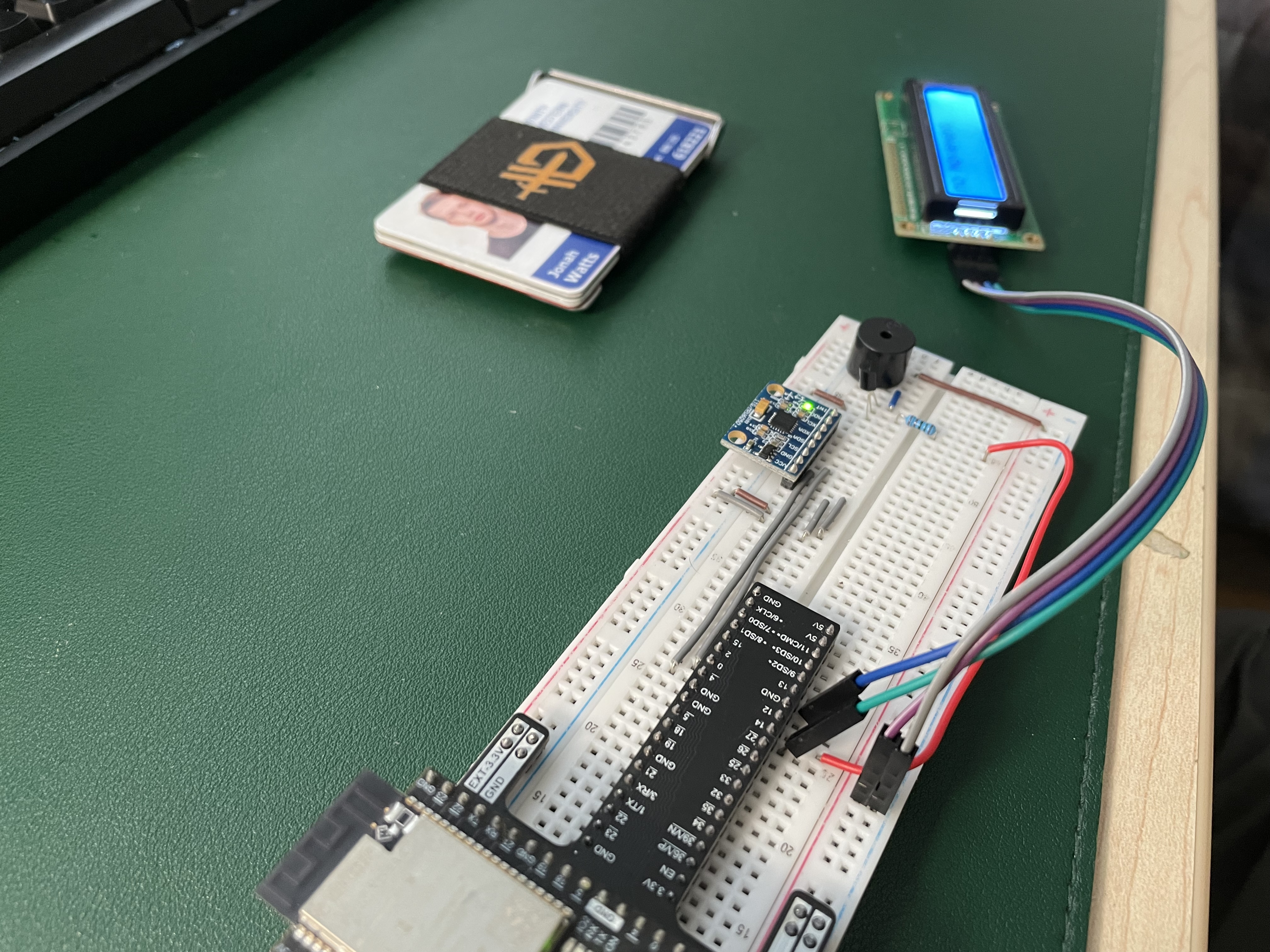
Photo(s) of the breadboard
Source Code
The Source code can be downloaded here here
from mpu6050 import MPU6050
import time
from machine import Pin, PWM, I2C
from I2C_LCD import I2cLcd
mpu=MPU6050(4,0) #attach the IIC pin(sclpin,sdapin)
mpu.MPU_Init() #initialize the MPU6050
G = 9.8
time.sleep_ms(1000)#waiting for MPU6050 to work steadily
#setup the buzzer
notes={
"C":2093,
"D":2349,
"E":2637,
"F":2793
}
#setup the buzzer
passiveBuzzer=PWM(Pin(12),2000)
passiveBuzzer.init()
passiveBuzzer.duty(0)
i2c = I2C(scl=Pin(14), sda=Pin(13), freq=400000)
devices = i2c.scan()
if len(devices) == 0:
print("No i2c device !")
else:
for device in devices:
print("I2C addr: "+hex(device))
lcd = I2cLcd(i2c, device, 2, 16)
try:
while True:
accel=mpu.MPU_Get_Accelerometer()#gain the values of Acceleration
gyro=mpu.MPU_Get_Gyroscope() #gain the values of Gyroscope
time.sleep_ms(500)
if accel[0]/16384 > 0.3:
passiveBuzzer.freq(notes["C"])
passiveBuzzer.duty(50)
lcd.move_to(0, 0)
lcd.putstr("Falling Left")
elif accel[1]/16384 > 0.3:
passiveBuzzer.freq(notes["D"])
passiveBuzzer.duty(50)
lcd.move_to(0, 0)
lcd.putstr("Falling Backward")
elif accel[0]/16384 < -0.3:
passiveBuzzer.freq(notes["E"])
passiveBuzzer.duty(50)
lcd.move_to(0, 0)
lcd.putstr("Falling Right")
elif accel[1]/16384 < -0.3:
passiveBuzzer.freq(notes["F"])
passiveBuzzer.duty(50)
lcd.move_to(0, 0)
lcd.putstr("Falling Forward")
else:
passiveBuzzer.duty(0)
print("no movement")
lcd.move_to(0, 0)
lcd.clear()
lcd.putstr("no movement")
except:
pass