CMPT401_TWU
Lab Report 7
06-11-2023
Jonah Watts
Table Of Contents:
- Lab 21.1: Ultrasonic Ranging
- Lab 21.2: Ultrasonic Ranging
- Lab 22.1: Matrix Keypad
- Lab 22.2: Matrix Door Lock
- Lab 23.1: Infrared Remote Control
- Lab 23.2: LED Control Through Infrared Remote
- Lab 24.1: Hygrothermograph
- Lab 24.2: Hygrothermograph
- Assignment Project #1
- Assignment Project #2
Lab 21.1: Ultrasonic Ranging
Lab 21.2: Ultrasonic Ranging
Lab 22.1: Matrix Keypad
Lab 22.2: Matrix Door Lock
Lab 23.1: Infrared Remote Control
Lab 23.2: LED Control Through Infrared Remote
Lab 24.1: Hygrothermograph
Lab 24.2: Hygrothermograph
Assignment Project #1
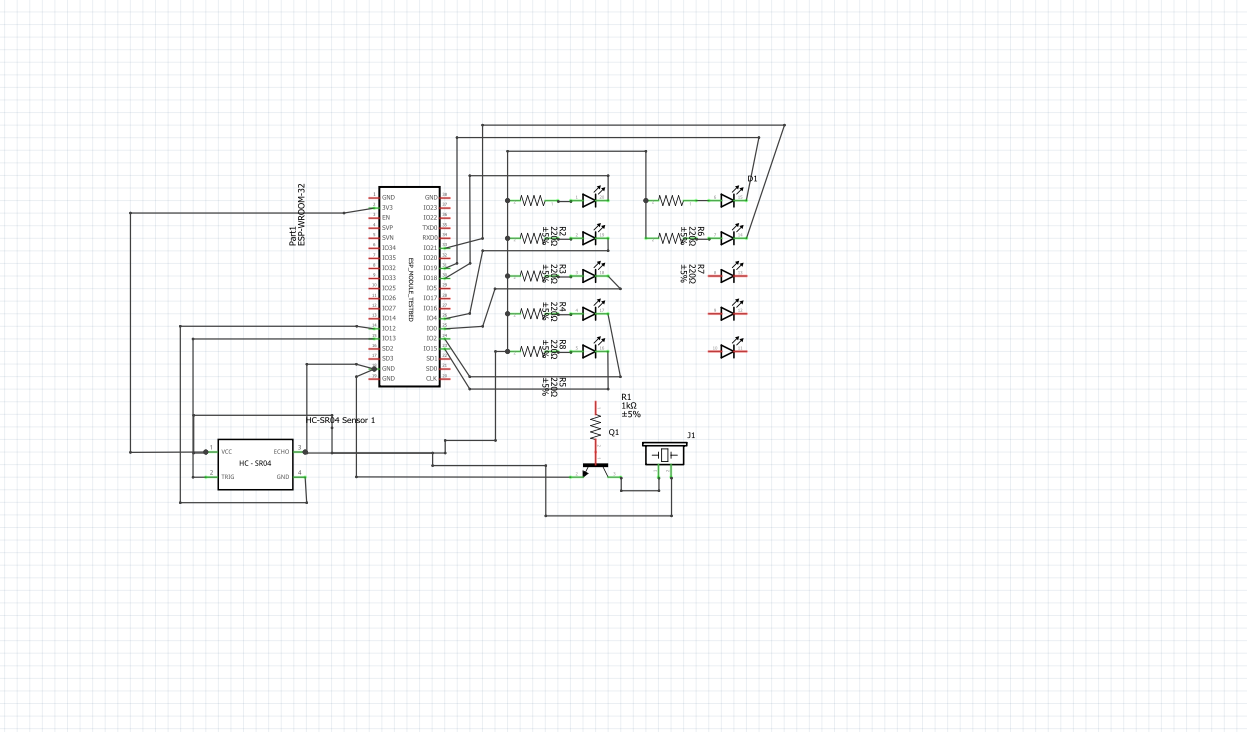
Task Description:
The goal of this assignment is to make a distance reactive sound and light machine, where there is a ultrasonic sensor, and by holding your hand at different disatances from the sensor, you are able to trigger the different noises (do-re-mi-fa-so-la-ti-do) and will light up a light bar to indicate the distance.
Hardware Components:
- 1x ESP32
- 1x ESP32 Breakout Board
- 1x Breadboard
- 1x Buzzer
- 1x 1k Ohm Resistor
- 1x PNP Transistor
- 1x Ultrasonic Sensor
- 8x 220 Ohm Resistor
- 1x LED Bar
Circut Diagrams
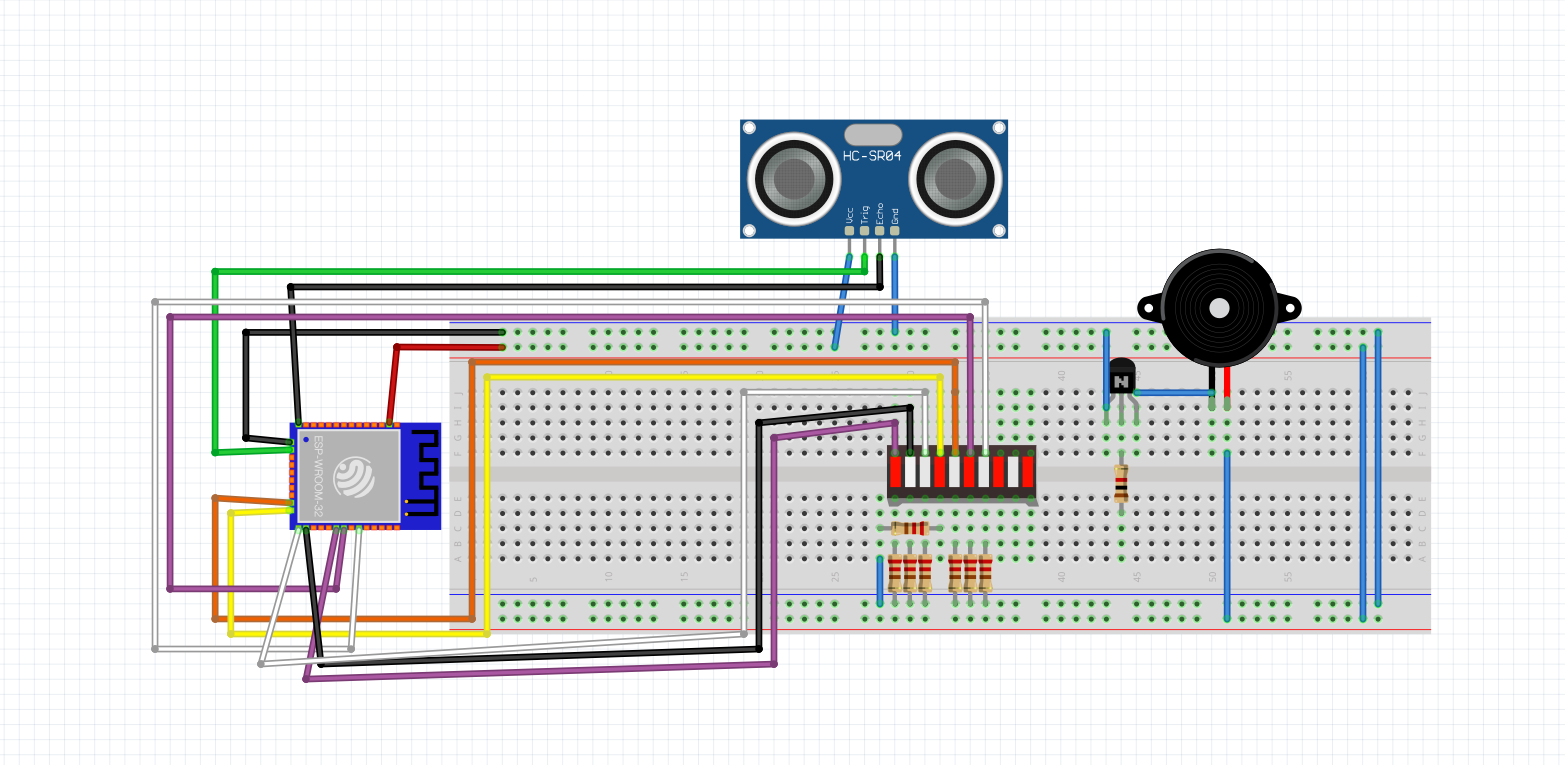
Photo(s) of the breadboard:


Source Code
The Source code can be downloaded here here
import time
from machine import Pin, PWM
pins=[15,2,0,4,5,18,19,21,22,23]
#setup the buzzer
passiveBuzzer=PWM(Pin(27),2000)
passiveBuzzer.init()
passiveBuzzer.duty(0)
#setup the ultrasonic sensor
trigPin=Pin(13,Pin.OUT,0)
echoPin=Pin(12,Pin.IN,0)
soundVelocity=340
distance=0
currentled = 16
#Init the notes used
notes={
"B6":1975,
"C":2093,
"C#":2217,
"D":2349,
"D#":2489,
"E":2637,
"F":2793,
"F#":2959,
"G":3135,
"G#":3322,
"A":3520,
"A#":3729,
"B":3951,
"C8":4186,
"C#8":4435,
"D8":4699,
"D#8":4978,
"E8":5274,
"F8":5587,
"F#8":5919,
"G8":6271,
"G#8":6644,
"A8":7040,
"A#8":7458,
"B8":7902,
}
#function to get the distance from the ultrasonic sensor
def getSonar():
trigPin.value(1)
time.sleep_us(10)
trigPin.value(0)
while not echoPin.value():
pass
pingStart=time.ticks_us()
while echoPin.value():
pass
pingStop=time.ticks_us()
pingTime=time.ticks_diff(pingStop,pingStart)
distance=pingTime*soundVelocity//2//10000
return int(distance)
#Show the correstponding LED
def showled(led):
length=len(pins)
currentled = led
for i in range(0,length):
leds=Pin(pins[i],Pin.OUT)
leds.value(0)
led=Pin(pins[led],Pin.OUT)
led.value(1)
#Main program
time.sleep_ms(2000)
passiveBuzzer.duty(50)
while True:
x = getSonar()
time.sleep_ms(200)
print('Distance: ',x,'cm' )
#Depending on the distance, play the corresponding note, and change the LED if needed,
if x<4:
print("0")
passiveBuzzer.freq(notes["C"])
showled(0)
elif x<8:
print("1")
showled(1)
passiveBuzzer.freq(notes["D"])
elif x<12:
print("2")
showled(2)
passiveBuzzer.freq(notes["E"])
elif x<16:
print("3")
showled(3)
passiveBuzzer.freq(notes["F"])
elif x<20:
print("4")
showled(4)
passiveBuzzer.freq(notes["G"])
elif x<24:
print("5")
showled(5)
passiveBuzzer.freq(notes["A"])
elif x<28:
print("6")
showled(6)
passiveBuzzer.freq(notes["B"])
elif x<32:
print("7")
showled(7)
passiveBuzzer.freq(notes["C8"])
Video of program in action
Assignment Project #2:
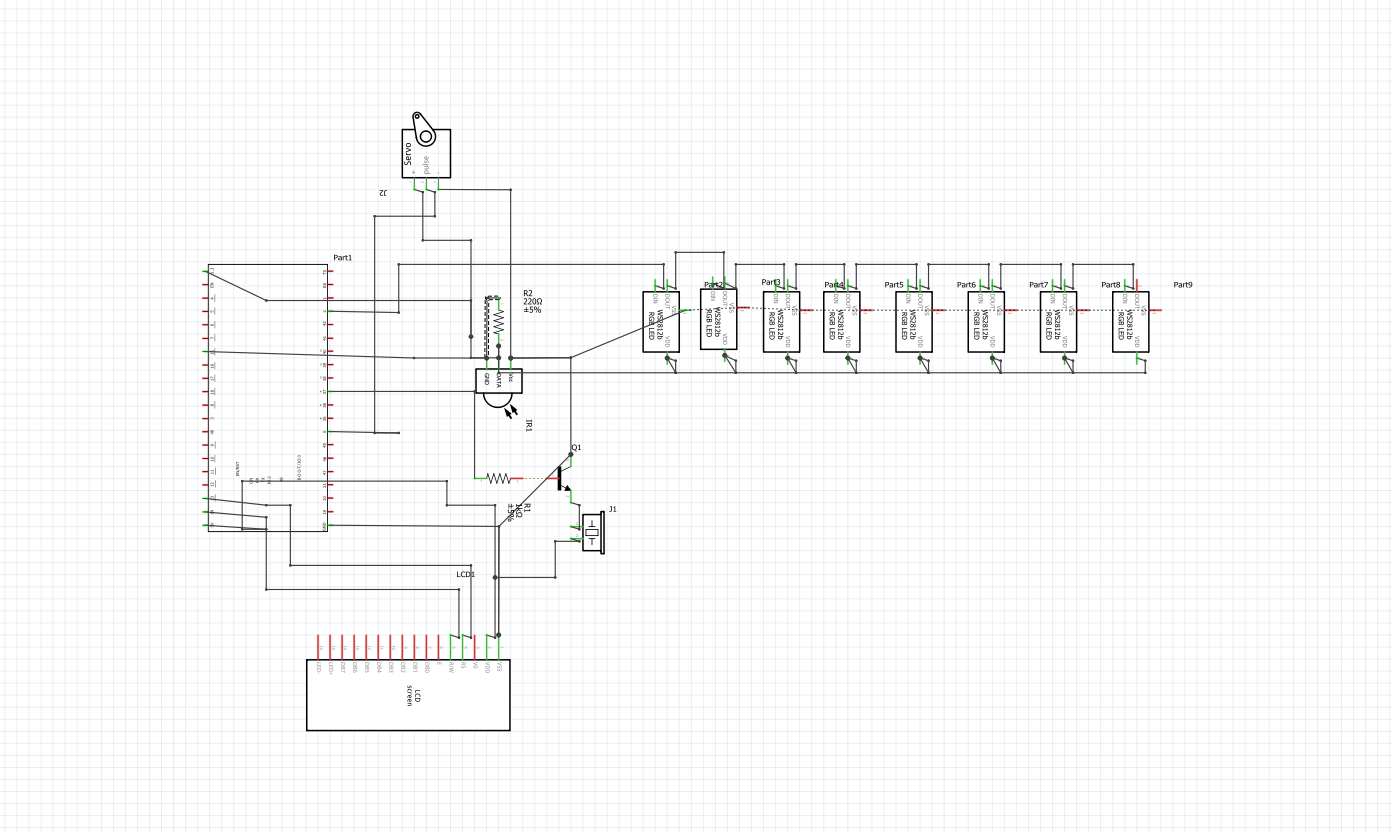
Task Description:
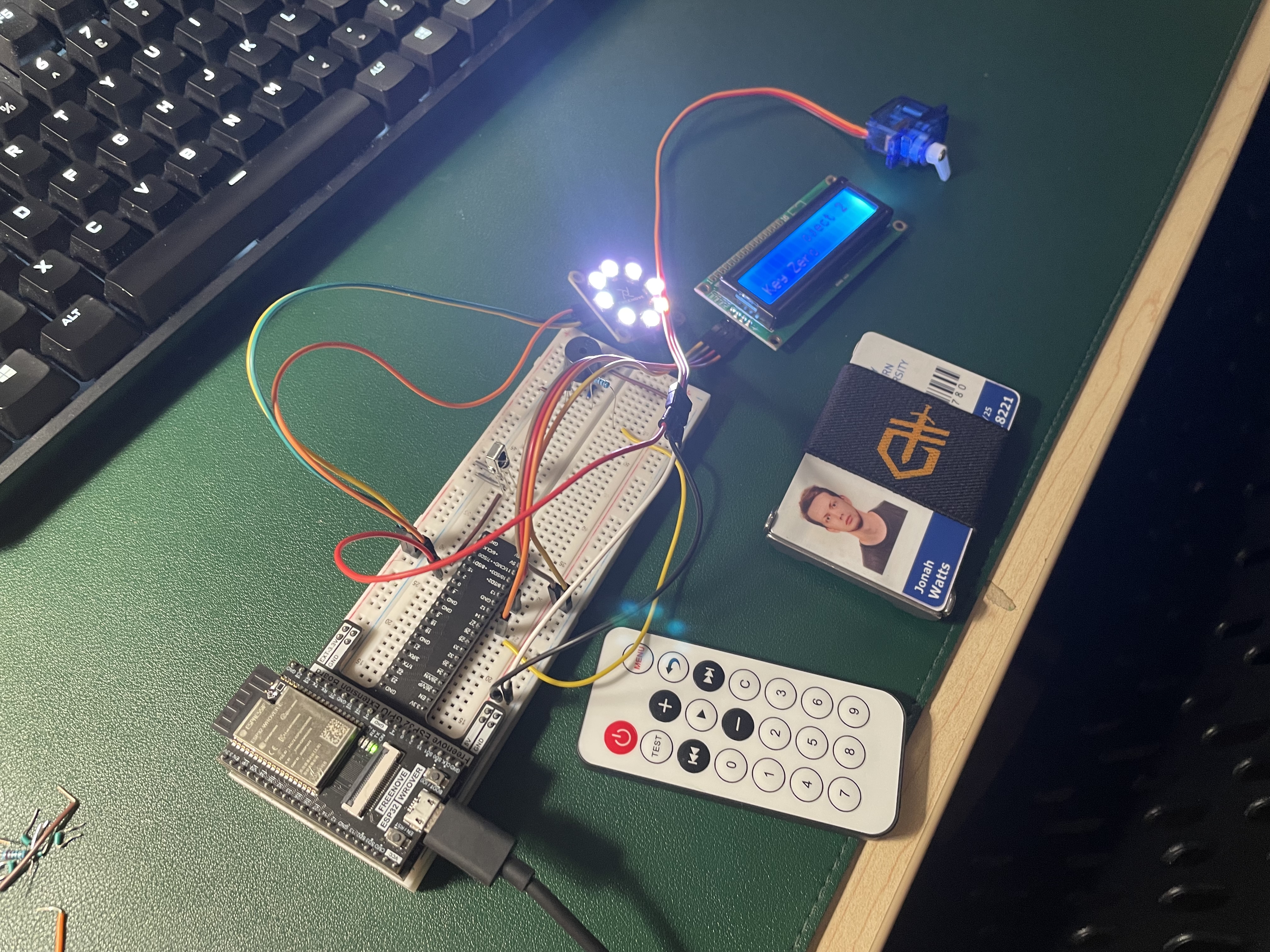
The task of this assignment is to control a variety of different devices attached to the ESP32 by using the infrared remote, where different buttons on the remote will trigger different events, such as a motor moving, a LCD screen changing message, a buzzer playing a tone, and a neo pixel changing color.
Hardware Components
- 1x ESP32
- 1x ESP32 Breakout Board
- 2x Breadboard
- 1x Buzzer
- 2x 1k Ohm Resistor
- 1x NPN Transistor
- 1x IR Reciever
- 1x LCD Screen
- 1x Neo Pixel
- 1x Servo Motor
Circut Diagrams
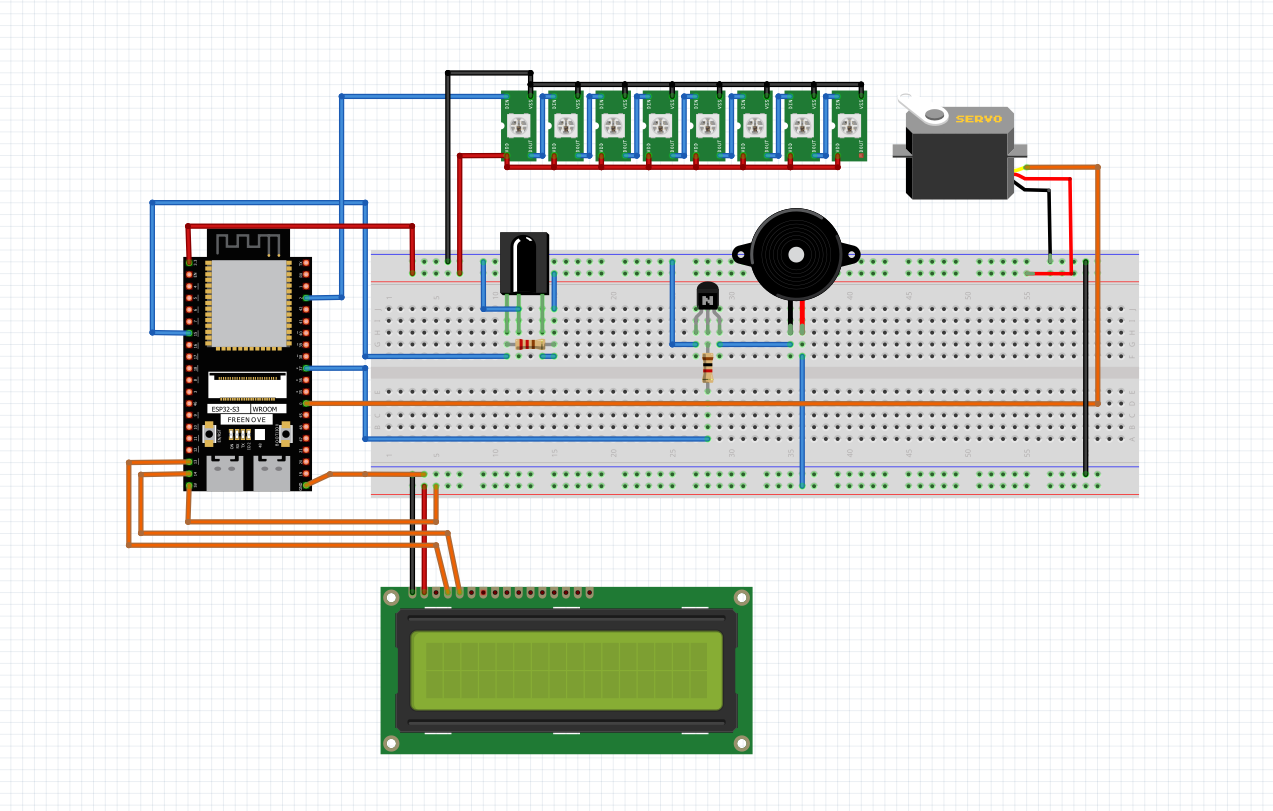
Photo(s) of the breadboard

Source Code
The Source code can be downloaded here here
from irrecvdata import irGetCMD
from machine import I2C, Pin, PWM
from I2C_LCD import I2cLcd
from myservo import myServo
import neopixel
import time
#setup the buzzer
notes={
"B6":1975,
"C":2093,
"C#":2217,
"D":2349,
"D#":2489,
"E":2637,
"F":2793,
"F#":2959,
"G":3135,
"G#":3322,
"A":3520,
"A#":3729,
"B":3951,
"C8":4186,
"C#8":4435,
"D8":4699,
"D#8":4978,
"E8":5274,
"F8":5587,
"F#8":5919,
"G8":6271,
"G#8":6644,
"A8":7040,
"A#8":7458,
"B8":7902,
}
#setup the buzzer
passiveBuzzer=PWM(Pin(27),2000)
passiveBuzzer.init()
passiveBuzzer.duty(0)
#setup neopixel
pin = Pin(2, Pin.OUT)
np = neopixel.NeoPixel(pin, 8)
#brightness :0-255
brightness=10
#10 differnt colors for the neopixel
colors=[
[200,200,200], #white
[200,0,0], #red
[0,200,0], #green
[0,0,200], #blue
[200,200,0], #yellow
[200,0,200], #magenta
[0,200,200], #cyan
[200,100,0], #orange
[200,0,100], #pink
[100,0,200], #purple
[0,0,0], #off
]
#setup the screen
i2c = I2C(scl=Pin(14), sda=Pin(13), freq=400000)
devices = i2c.scan()
if len(devices) == 0:
print("No i2c device !")
else:
for device in devices:
print("I2C addr: "+hex(device))
lcd = I2cLcd(i2c, device, 2, 16)
#Setup the servao
servo=myServo(0)#set servo pin
servo.myServoWriteAngle(0)#Set Servo Angle
time.sleep_ms(1000)
recvPin = irGetCMD(15)
try:
lcd.move_to(0, 0)
lcd.putstr("Lab 7 Project 2")
count = 0
while True:
irValue = recvPin.ir_read()
if irValue:
print(irValue)
if irValue == "0xffa25d":
lcd.move_to(0, 1)
lcd.putstr("Power")
servo.myServoWriteAngle(0)
for j in range(0,8):
np[j]= [0,0,0]
np.write()
time.sleep_ms(50)
if irValue == "0xffe21d":
lcd.move_to(0, 1)
lcd.putstr("Menu ")
elif irValue == "0xff22dd":
lcd.move_to(0, 1)
lcd.putstr("Test ")
elif irValue == "0xff02fd":
lcd.move_to(0, 1)
lcd.putstr("Plus ")
elif irValue == "0xffc23d":
lcd.move_to(0, 1)
lcd.putstr("Return ")
elif irValue == "0xffe01f":
lcd.move_to(0, 1)
lcd.putstr("Back ")
elif irValue == "0xffa857":
lcd.move_to(0, 1)
lcd.putstr("Play ")
elif irValue == "0xff906f":
lcd.move_to(0, 1)
lcd.putstr("Forward ")
elif irValue == "0xff9867":
lcd.move_to(0, 1)
lcd.putstr("Minus ")
elif irValue == "0xff6897":
lcd.move_to(0, 1)
lcd.putstr("Key Zero ")
for j in range(0,8):
np[j]= colors[0]
np.write()
time.sleep_ms(50)
passiveBuzzer.freq(notes["C"])
passiveBuzzer.duty(50)
time.sleep_ms(500)
passiveBuzzer.duty(0)
servo.myServoWriteAngle(0)
elif irValue == "0xff30cf":
lcd.move_to(0, 1)
lcd.putstr("Key One ")
for j in range(0,8):
np[j]= colors[1]
np.write()
time.sleep_ms(50)
passiveBuzzer.freq(notes["D"])
passiveBuzzer.duty(50)
time.sleep_ms(500)
passiveBuzzer.duty(0)
servo.myServoWriteAngle(18)
elif irValue == "0xff18e7":
lcd.move_to(0, 1)
lcd.putstr("Key Two ")
for j in range(0,8):
np[j]= colors[2]
np.write()
time.sleep_ms(50)
passiveBuzzer.freq(notes["E"])
passiveBuzzer.duty(50)
time.sleep_ms(500)
passiveBuzzer.duty(0)
servo.myServoWriteAngle(36)
elif irValue == "0xff7a85":
lcd.move_to(0, 1)
lcd.putstr("Key Three ")
for j in range(0,8):
np[j]= colors[3]
np.write()
time.sleep_ms(50)
passiveBuzzer.freq(notes["F"])
passiveBuzzer.duty(50)
time.sleep_ms(500)
passiveBuzzer.duty(0)
servo.myServoWriteAngle(54)
elif irValue == "0xff10ef":
lcd.move_to(0, 1)
lcd.putstr("Key Four ")
for j in range(0,8):
np[j]= colors[4]
np.write()
time.sleep_ms(50)
passiveBuzzer.freq(notes["G"])
passiveBuzzer.duty(50)
time.sleep_ms(500)
passiveBuzzer.duty(0)
servo.myServoWriteAngle(72)
elif irValue == "0xff38c7":
lcd.move_to(0, 1)
lcd.putstr("Key Five ")
for j in range(0,8):
np[j]= colors[5]
np.write()
time.sleep_ms(50)
passiveBuzzer.freq(notes["A"])
passiveBuzzer.duty(50)
time.sleep_ms(500)
passiveBuzzer.duty(0)
servo.myServoWriteAngle(90)
elif irValue == "0xff5aa5":
lcd.move_to(0, 1)
lcd.putstr("Key Six ")
for j in range(0,8):
np[j]= colors[6]
np.write()
time.sleep_ms(50)
passiveBuzzer.freq(notes["B"])
passiveBuzzer.duty(50)
time.sleep_ms(500)
passiveBuzzer.duty(0)
servo.myServoWriteAngle(108)
elif irValue == "0xff42bd":
lcd.move_to(0, 1)
lcd.putstr("Key Seven ")
for j in range(0,8):
np[j]= colors[7]
np.write()
time.sleep_ms(50)
passiveBuzzer.freq(notes["C8"])
passiveBuzzer.duty(50)
time.sleep_ms(500)
passiveBuzzer.duty(0)
servo.myServoWriteAngle(126)
elif irValue == "0xff4ab5":
lcd.move_to(0, 1)
lcd.putstr("Key Eight ")
for j in range(0,8):
np[j]= colors[8]
np.write()
time.sleep_ms(50)
passiveBuzzer.freq(notes["D8"])
passiveBuzzer.duty(50)
time.sleep_ms(500)
passiveBuzzer.duty(0)
servo.myServoWriteAngle(144)
elif irValue == "0xff52ad":
lcd.move_to(0, 1)
lcd.putstr("Key Nine ")
for j in range(0,8):
np[j]= colors[9]
np.write()
time.sleep_ms(50)
passiveBuzzer.freq(notes["E8"])
passiveBuzzer.duty(50)
time.sleep_ms(500)
passiveBuzzer.duty(0)
servo.myServoWriteAngle(162)
except Exception as e:
print("Error:", e)
servo.deinit()
lcd.clear()
passiveBuzzer.deinit()